


摘要:机器人有三种主要驱动方式,包括电动驱动、液压驱动和气动驱动。电动驱动具有高精度、良好控制性和节能环保的优点,但功率和速度相对较低。液压驱动则拥有高功率和快速响应能力,适用于重负载和高精度应用,但成本较高且维护复杂。气动驱动简单易维护,成本较低,适用于轻负载和简单运动场合,但精度和速度相对较低。三种驱动方式各有优缺点,选择应根据具体应用场景和需求进行权衡。
本文目录导读:
随着科技的飞速发展,机器人技术已经逐渐融入我们的日常生活与工业生产中,机器人的驱动方式对其性能、效率、精度和使用场景有着直接的影响,目前,机器人主要存在三种驱动方式:电动驱动、液压驱动和气动驱动,本文将详细探讨这三种驱动方式的优缺点,以便读者更好地了解并选择适合自己应用场景的机器人。
电动驱动
1、优点
(1)精确度高:电动驱动方式通过电机和减速器实现精准控制,能够实现高精度的运动和操作。
(2)环保性:电动驱动方式无污染物排放,对环境友好。
(3)易于维护:电动驱动系统结构简单,维护方便,使用寿命长。
(4)易于实现智能化:电动驱动方式易于与传感器、控制器等智能化设备集成,实现机器人的智能化控制。
2、缺点
(1)动力受限:电动驱动方式受电源容量限制,持续工作能力较弱。

(2)速度限制:电动驱动系统的响应速度和运动速度相对较低。
液压驱动
1、优点
(1)动力强大:液压驱动方式能够提供较大的动力和扭矩,适用于重型机器人和需要大力矩的场合。
(2)响应速度快:液压系统的响应速度较快,适用于需要快速运动的场景。
(3)易于实现过载保护:液压系统可以通过设置压力阀等元件实现过载保护,提高机器人的安全性。
2、缺点
(1)精度问题:液压系统的精度相对较低,难以实现高精度的运动和操作。
(2)维护成本高:液压系统需要定期更换液压油,维护成本较高。
(3)对环境有影响:液压系统可能存在油液泄漏问题,对环境造成污染。
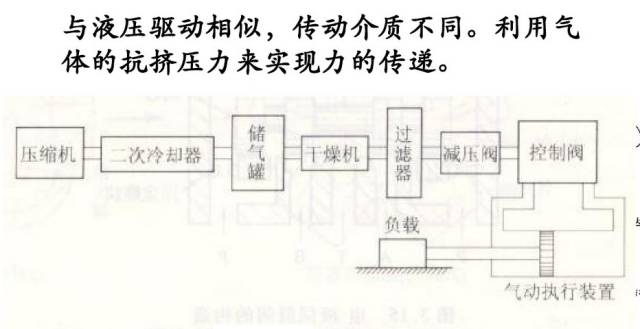
气动驱动
1、优点
(1)速度快:气动驱动方式响应速度快,适用于需要迅速响应的场景。
(2)动力强劲:气动系统能够提供较大的动力,适用于一些需要较高动力的应用。
(3)维护简单:气动系统结构简单,维护相对方便。
(4)成本较低:气动元件成本相对较低,降低了机器人的制造成本。
2、缺点
(1)精度较低:气动驱动方式的精度相对较低,难以实现高精度的运动和操作。
(2)稳定性问题:气压波动可能导致机器人运动的不稳定性。
(3)对环境有影响:气动系统可能存在气体泄漏问题,对环境造成一定影响,气动系统一般需要使用压缩气体作为动力源,消耗能源较多,在选择气动驱动方式时需要考虑能源成本和环境因素,气动驱动方式在噪音控制方面也存在一定挑战,需要采取相应的措施降低噪音污染,尽管气动驱动方式存在一些缺点,但在某些特定应用场景中仍具有优势,在需要高速运动和大力矩的场合,气动驱动方式可能是一个更好的选择,随着技术的不断进步,气动驱动方式的精度和稳定性也在不断提高,在选择机器人驱动方式时需要根据具体应用场景进行综合考虑,五、结论综上所述,电动驱动、液压驱动和气动驱动三种方式各有优缺点,在选择机器人驱动方式时需要根据具体应用场景进行综合考虑包括精度要求、动力需求、响应速度、维护成本、环境因素等多方面因素,随着科技的不断发展未来机器人驱动方式可能会更加多样化和智能化为人们的生活和工业生产带来更多便利和创新,二、实际应用中的选择策略在实际应用中如何选择机器人驱动方式需要考虑多个因素包括任务需求、工作环境、成本预算等,首先需要根据任务需求确定机器人需要完成的工作类型如高精度操作、重型搬运、快速拾取等,然后需要根据工作环境考虑驱动方式的适应性例如在一些恶劣环境下液压驱动可能更加耐用而在一些需要高精度操作的场合电动驱动可能更加合适,最后还需要考虑成本预算选择适合自身预算的驱动方式,此外在选择机器人驱动方式时还需要关注技术发展趋势和创新能力,一些新兴技术如智能控制、传感器技术等可以与不同驱动方式结合提高机器人的性能和质量,因此在选择机器人驱动方式时需要关注技术发展动态以便及时引入新技术提高机器人的性能和质量,总之在选择机器人驱动方式时需要综合考虑多方面因素包括任务需求、工作环境、成本预算、技术发展趋势等,只有选择合适的驱动方式才能确保机器人的性能和质量满足实际需求并带来更好的效益。
 浙ICP备2023031961号-8
浙ICP备2023031961号-8 浙ICP备2023031961号-8
浙ICP备2023031961号-8
还没有评论,来说两句吧...